
* One of the more interesting aviation fads of the 1950s and the 1960s was the "flying platform" and the related "flying jeep". These were small rotorcraft, mostly based on ducted props. The flying platforms carried a single soldier and seemed attractive for scout missions, while the larger flying jeep appeared potentially useful for a number of different purposes. While the flying platforms and jeeps had some advantages, they were not successful. This document outlines the history of the flying platforms and jeeps.
* The flying platforms grew out of research conduction by the US National Advisory Committee on Aeronautics (NACA, the main precursor of the National Aeronautics & Space Administration / NASA) in the early 1950s on the feasibility of one-man flying platforms for combat use. The tests involved pilots "flying" tethered platforms, at first lifted by compressed air, and then by rotors.
The concepts investigated in the tests were based on thinking by NACA engineer Charles H. Zimmerman, who proposed that if the rotors of a helicopter were placed on the bottom of the aircraft, a pilot would be able to steer it just by shifting weight, a concept Zimmerman called "kinesthetic control". It was hoped that kinesthetic control would allow a pilot to fly such platforms with little training. The tests demonstrated the technical validity of the concept. The NACA results were released to the public, resulting in flying platform prototypes from three companies: de Lackner, Bensen, and Hiller.
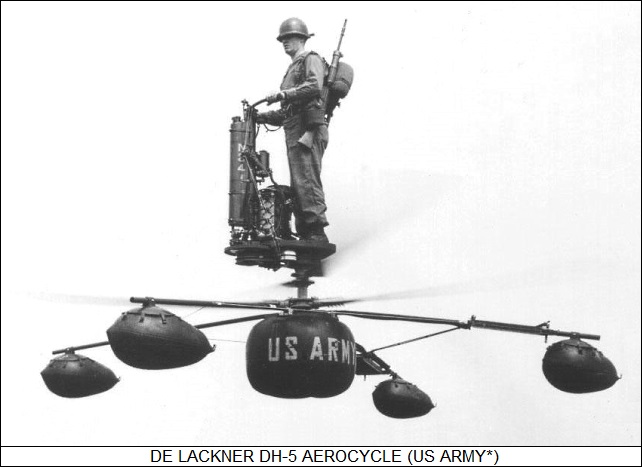
* In the mid-1950s, the de Lackner company privately developed a rotorcraft named the "DH-4 Helivector", later renamed the "HZ-1 Aerocycle", that looked something like a cross between a helicopter, outboard motor, and motorbike, which was actually more or less what it was. The de Lackner machine consisted of a frame that supported the engine of a 30 kW (40 HP) Mercury outboard motor, with landing gear consisting of an arrangement of airbags on the ends of spars. The airbags were later replaced by metal skids. The engine drove a pair of 4.6-meter (15-foot) contra-rotating rotors directly beneath it, while the pilot stood vertically on a platform above the engine, protected from falling into the rotors by a safety harness, and hanging on motorcycle handlebars with it a twist-grip throttle. He used kinesthetic control to fly the machine.
The Helivector / Aerocycle first flew in January 1955, and the Army ordered a dozen. De Lackner claimed the machines could fly at up to 105 KPH (65 MPH), carry up to 55 kilograms (120 pounds) payload besides the pilot, and fly for an hour. However, while the thing looked like it would have been a lot of fun to fly, it was also dangerous. Not only did the pilot stand above the whirling rotors, but the rotors were wide and close to the ground, making them a hazard on landings and take-offs since they could easily kick up rocks and other debris.
In addition, although some sources claim that the Helivector / Aerocycle was easy to fly, others state that the test pilot insisted that novices could not pilot it safely. After two flight accidents in which the contra-rotating rotors flexed and collided, the project was abandoned before somebody got seriously hurt. At least one survives as a museum display.
* Igor Bensen's "B-10 Propcopter" was no more successful. This ugly little machine consisted of a boxy frame with 1.2-meter (4-foot) props mounted vertically on the front and back of the frame. Each was powered by its own 54 kW (72 HP) McCulloch engine. The Propcopter flew in 1959 and apparently was tricky to handle. In any case, nothing came of it.
* The Hiller designs were better thought out, and attracted a good deal of public attention. Hiller developed their first flying platform on the basis of a contract awarded in late 1953 by the Office of Naval Research (ONR) for a one-man flying platform. The machine made its first flight in February 1955, and was named the "VZ-1 Pawnee".
The Pawnee featured a pair of contra-rotating rotors spinning inside a duct with a diameter of 1.5 meters (5 feet). Each rotor was driven by its own 30 kW (40 HP) two-stroke engine. The pilot stood above the duct, surrounded by a circular handrail and protected by a safety harness. He controlled the engines with a twist-grip throttle and leaned to guide the aircraft. The duct improved safety during take-off and landing. The duct also provided additional lift, since there was a horizontal "lip" around its top edge that curved down into the duct. The airflow into the duct resulted in low air pressure above the lip, and the pressure difference between the top and bottom of the lip generated a net upward force, providing as much as 40% of the total lift of the aircraft.
The Pawnee handled very well in flight tests. The machine was then modified with longer landing gear legs to increase ground clearance, and eight vanes were mounted underneath the duct to improve flight control.

The US Army was interested in the Pawnee, and in November 1956 awarded a contract to Hiller for the construction of a larger version, which performed its first flight in 1958. It had three 30 kW (40 HP) engines, driving rotors in a 2.4-meter (8-foot) diameter duct. This more than doubled the rotor disk area, increasing payload and range while reducing noise and downwash.
The Army ordered a third Pawnee with a deep drum-like duct that improved lift performance and allowed the machine to carry heavier payloads. It also featured a circular landing skid instead of the multi-point wheeled landing gear of the two earlier Pawnees, and had a seat and conventional helicopter controls, since kinesthetic control became less effective as vehicle power and weight increased. This version first flew in 1959.
The Pawnee had its merits, but it was ultimately judged as too small, slow, and of limited usefulness for combat service. The Army abandoned the program in 1963, and two of the three Pawnees survive as museum displays.
* For lack of a better place to discuss this, another interesting or at least humorous flying platform, the Bensen "B-12 Sky-Mat", was developed in the late 1960s. The Sky-Mat was basically nothing more than a rectangular metal frame assembly with a seat and controls at the center, surrounded by ten -- count them, ten -- 7.46 kW (10 HP) piston engines, each driving a two-blade rotor.
It was one of the most dubious-looking flying contraptions ever made. It would be a good guess that keeping all ten of the engines working right would be a pain, and just looking at the thing suggests that its flight behavior was at least somewhat wobbly. However, it's hard to pick on Igor Bensen, inventor of the well-known Bensen Gryocopter, too much. Bensen was a very ingenious and energetic man, willing to try almost anything -- and if some of his experiments were less credible than others, that's the way experiments work.
BACK_TO_TOP* While the Army was pursuing the flying platforms, they were also investigating larger rotorcraft along similar lines, called the "flying jeeps". Some sources imply that they were intended mostly for hovercraft operation, with an ability to fly over obstacles or impassable terrain when necessary, while other sources indicate they were regarded as helicopter-like utility vehicles that operated normally as flying machines. Whatever the case, the US Army Transportation Research Command began an investigation into the flying jeeps in 1956, leading to award of contracts for prototypes to Chrysler, Curtiss-Wright, and Piasecki in 1957.
* Chrysler developed two prototypes of their "VZ-6" flying jeep, delivering them to the Army in late 1958. The VZ-6 was a single-seat vehicle, shaped like a rectangular box, with two ducted rotors in the box front and back. There were rubber skirts around the bottom, and vanes underneath the rotors to provide airflow for forward motion.
The VZ-6 was powered by a single 373 kW (500 HP) piston engine and had a gross weight of 1,080 kilograms (2,380 pounds). Tethered flights performed in 1959 indicated that the VZ-6 was not very controllable, and was also badly underpowered. On the VZ-6's first untethered flight attempt, it flipped over. The pilot escaped serious injury, but the vehicle was badly damaged. The Army recognized the VZ-6 as a loser, and got rid of both prototypes in 1960.
* The Curtiss-Wright entry was the "VZ-7", also known as the "Flying Truck", with two prototypes delivered to the Army in mid-1958. The VZ-7 was a simple metal truss with a pilot up front and four horizontal propellers at each of four corners. The props were all driven by a single 317 kW (425 SHP) Turbomeca Artouste turboshaft engine, mounted underneath the central beam. The props were originally ducted, but the ducts were removed after initial test flights. The aircraft was guided by differential pitch between the propellers, and a rudder in the turbine exhaust.
The VZ-7 was 5.2 meters long by 4.9 meters wide (17 by 16 feet) and had a maximum take-off weight of 770 kilograms (1,700 pounds), with 250 kilograms (550 pounds) of that being payload. The VZ-7 handled well and was easy to fly, but it did not meet either altitude or speed requirements, and the prototypes were returned to Curtiss-Wright in mid-1960.
* The Piasecki flying jeep effort was the most successful of the three. The first of the class was the Piasecki "Model 59H AirGeep", which was given the Army designation "VZ-8P". The AirGeep was 7.9 meters long and 2.7 meters wide (26 feet by 9 feet), with three-bladed rotors in ducts in the front and the back. The pilot and passenger sat between the ducts. In the VZ-8P, the 2.4-meter (8-foot) diameter rotors were driven by a pair of 134 kW (180 HP) Lycoming piston engines, with the power linkages designed so that one engine could drive both rotors if the other engine failed.
The rotors spun in opposite directions to reduce torque effects. Control was provided by varying rotor pitch, as well as through vanes mounted in the downdraft. Forward motion was achieved by pitching the aircraft nose-down.
The AirGeep was first flown on 12 October 1958. Apparently it proved grossly underpowered, barely able to fly over a fence, and it was sent back to the shop, where the piston engines were replaced by a single 317 kW (425 HP) Turbomeca Artouste IIB turbine engine. The upgraded AirGeep flew in late June 1959. It weighed 1.1 tonnes (2,500 pounds) and could carry a payload of 550 kilograms (1,200 pounds), including the pilot. The AirGeep was put through trials for both the Army and the Navy over the next few years. The engine was upgraded again to a Garrett / AiResearch 331-6 engine, which had a higher power-to-weight ratio. For Navy trials, which began in June 1961, the rotorcraft was fitted with floats, and redesignated the "PA-59N SeaGeep".

* Piasecki wanted to build a bigger and better AirGeep, and the Army Transportation Research Command obliged them by issuing a contract for what Piasecki called the "Model 59K" and what the Army called the "VZ-8P(B) AirGeep II", which made its first flight in the summer of 1962.
The AirGeep II was similar to the AirGeep, except that the aircraft was "bent" in the middle so that the rotors were tilted fore and aft, it seems to improve forward flight characteristics. The AirGeep II used twin 298 kW (400 SHP) Turbomeca Artouste IIC turboshaft engines, once again linked so that if one failed the other would drive both rotors. One engine could also be coupled to the landing wheels to drive the machine on the ground. The increased power allowed a maximum take-off weight of 2.2 tonnes (4,800 pounds). The pilot and observer had "zero-zero" ejection seats, allowing safe escape if the machine was on the ground and standing still, and there were apparently seats for additional passengers. That was as far as the AirGeep program went, however, with the Army finally losing interest and canceling the effort.
BACK_TO_TOP* There was actually a jet-powered flying platform. In the mid-1960s, engine manufacturer Williams Research developed a light turbofan engine, the "WR19", with a thrust of 1.91 kN (195 kgp / 430 lbf), which was used in a "flying belt" that could be strapped on somebody's back to allow flights of up to 20 minutes. It was a sexy toy but of no particular usefulness, and it was canceled in 1969.
Williams continued to tinker with the idea, coming up with a one-man flying platform powered by the WR19 or a derivative engine, known as the "WASP", which was later renamed the "X-Jet". This machine looked something like a flying trashcan on skids, and could carry a pilot directing the machine with two grip-type controls. It was evaluated in the 1980s; videos of its flight suggest it performed very nicely and was easy to handle, though apparently it had problems with windy conditions. Noises were made about a more capable successor, but its endurance was too limited and, as was the case with most of the other one-person flying machines, it was hard to understand that it offered any utility proportional to its expense and complexity.

Details of the X-Jet program remain entirely obscure. One X-Jet is now on display at the USAF Museum in Ohio, while another is on display at the Seattle Museum of Flight. The WR19 and its descendants did prove to be useful powerplants for long-range cruise missiles.
The X-Jet was effectively the last gasp of the flying platform. Other flying platforms and jeeps have been flown as demonstrators, but none of them went anywhere. In the 21st century, the much bigger action is on drones and hybrid / electric aircraft; the flying platforms and jeeps are unlikely to make a return.
* As a footnote: one of the most unusual flying machines ever built was the Avro "Avrocar", an attempt to build a true "flying saucer" based on ducted-fan principles. It is hard to categorize it as either a flying platform or jeep, but since it is hard to categorize at all, it might as well be included here.
The Avrocar was the brainchild of John Frost, an aeronautical engineer at the Malton-Toronto plant of Avro Canada, who conducted studies in the early 1950s on extremely unorthodox vertical-take-off aircraft, beginning with one design that looked like a shovel blade named the "Avro Ace" or "Project Y-1", and then moving on to saucer-shaped aircraft, originally designated "Project Y-2". Frost felt that such vehicles could offer vertical take-off capability as well as high-speed forward flight.
The US military became interested, leading to the award of a US Air Force contract in 1955 for experimental development that evolved through various designations such as "Project Silver Bug", "Weapons System 606A (WS-606A)", "Research Project 1194", and so on. The whole project was originally kept a deep secret since it was felt to be a major potential breakthrough, though in hindsight it is tempting to wonder if it was also out of fear of mockery. After considering and eliminating a number of different configurations, the effort focused on development of a proof of concept vehicle named the "VZ-9-AV Avrocar" which was funded by both the US Army and US Air Force. It looked very much like an ordinary but greatly scaled-up modern "Frisbee" toy, 5.5 meters in diameter and 1.1 meters thick at the center (18 by 3.5 feet).
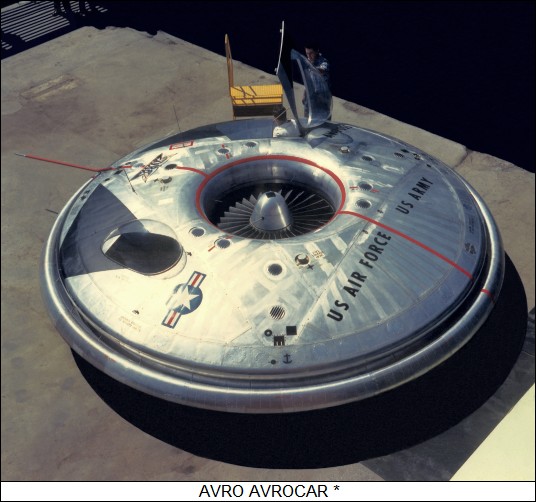
There was a fan 1.5 meters (5 feet) in diameter built into a duct in the center, and two little single-seat cockpits with individual clamshell bubble canopies, giving the vehicle the looks of a bug-eyed 1950s spaceship of some sort. The Avrocar was powered by three Continental J69 jet engines, which were arranged in the fuselage in a triangle around the central fan. The exhausts of the jet engines drove the fan and were also ducted around the edge of the Avrocar to provide lift at low speed. Engine thrust could be redirected to provide forward thrust, with the saucer-shaped airframe acting as a "lifting body".
Frost was extremely enthusiastic about the possibilities of his flying-saucer concept, envisioning an "Avrowagon" for family use, an "Avropelican" for naval use, a scaled-up transport version, and a Mach-2 fighter-interceptor version.
A wind-tunnel test model and a flying prototype were built. The test model was sent to the NASA Ames Center in California for wind-tunnel tests. First tethered flight of the flying prototype was at Malton on 29 September 1959, followed by the first untethered flight on 5 December 1959. Although Frost and his staff recognized that the Avrocar was inherently unstable and had incorporated an electromechanical stabilization system, it wasn't up to the job, and once the Avrocar picked itself up to above chest height and got out of ground effect, it bobbled around drunkenly.
An improved stabilization system was considered, but Avro was in chaos due to the cancellation of the "CF-105 Arrow" interceptor program. The chaos filtered down to the Avrocar program, and the US backers of the program lost interest. The program was axed in December 1961. Whether it would have ever flown right remains an open question. Various implausible rumors still circulate that the military actually did get the Avrocar or something like it to work, accounting for many UFO reports.
The flight prototype ended up on display at the US Army Transportation Museum The wind-tunnel test model in the possession of the Smithsonian Air & Space Museum, though at last notice it was on load to the USAF Museum. One wonders if they take it out for a spin every now and then, and abduct somebody just for fun. The truth is out there.
BACK_TO_TOP* Since the flying platforms and jeeps are a very obscure topic, it is unsurprising that sources tend to differ greatly on details. For example, the numbers of Hiller Pawnees built seems to vary from three to six. My best estimate is that only three were built, since there were three different configurations, and given the highly experimental nature of the program there doesn't seem to have been much motivation to build duplicate prototypes. One of the Pawnees also appears to have had the designation "VZ-1E", but it is uncertain which one. Similarly, some sources seem to hint that the de Lackner Aerocycle and the Helivector were different rotorcraft, but no details or photographs support this notion. Finally, the specific reasons given for abandoning these programs vary wildly from source to source.
Given how inconclusive the efforts to build flying platforms and jeeps turned out to be, it is surprising in hindsight how much public interest there was in them in the early 1960s. I vaguely recollect that Monogram made models of them, with even more vague memories of other toys, including flying ones powered by RC model aircraft engines, and clearly recollect them in action cartoons and comic books. Decades later they were largely forgotten, though interestingly a few years ago I received a technical data book on a Japanese animation series called GUNDAM from Japanese business acquaintances in which flying platforms, called "Wappas", were well represented.
* Sources for this document include:
Bill Zuk, author of the book AVROCAR: CANADA'S FLYING SAUCER, corrected a number of details on the subject for the v1.0.5 version of this document. Those interested in more information on the Avrocar may be interested in this book, though since I have not read it myself, I can say nothing more about it.
* Revision history:
v1.0 / 01 aug 97 v1.1 / 01 jul 98 / Polished, added notes on Aerobot & Hummingbird. v1.2 / 01 sep 99 / Tweaked, added note on SoloTrek XFV. v1.3 / 01 oct 00 / Typos, added comments on Dragon Warrior. v1.4 / 01 jun 01 / Polished, added data on VZ-6 and Avrocar. v1.0.5 / 01 sep 01 / Corrected data on Avrocar as per Bill Zuk. v1.0.6 / 01 oct 01 / Updated information on Millennium Jet. v1.0.7 / 01 dec 01 / Added material on PAM 100B ILV. v1.0.8 / 01 dec 03 / Added stuff on WASP. v1.0.9 / 01 oct 04 / Review & polish. v1.1.0 / 01 sep 06 / Review & polish. v1.1.1 / 01 aug 08 / Review & polish. v1.2.0 / 01 jun 09 / General refurbishment. v1.2.1 / 01 may 11 / Review & polish. v1.3.0 / 01 apr 13 / DARPA Transformer program. v1.4.0 / 01 mar 15 / Martin Jetpack, ARES, e-Volo. v1.4.1 / 01 feb 17 / Review & polish. v1.4.2 / 01 jan 19 / Review & polish. v1.4.3 / 01 nov 20 / Review & polish. v2.0.0 / 01 sep 22 / Cut out comments on later dead-end projects. v2.0.1 / 01 jul 24 / Review & polish.BACK_TO_TOP
