
* One of the latest trends in robot aircraft is the "attack drone" or "uninhabited combat air vehicle (UCAV)". This document outlines current developments in US attack drones. A list of illustration credits is included at the end.
* The first serious operational use of drones was during the Vietnam War, when the US flew Ryan Firebee target drones on reconnaissance missions over North Vietnam -- the reconnaissance drones being known as "Lightning Bugs". Ultimately, some were heavily modified, with wide-span wings and external fuel tanks.
If drones could be used for reconnaissance, it was obvious that they could also be used for active combat missions, at least in principle. In 1964, Ryan conducted experiments under "Project CeeBee" using a Firebee fitted with underwing pylons to carry two 115-kilogram (250-pound) bombs, later fitting the machine with longer wings to carry two 225-kilogram (500-pound) SUU-7 cluster munition dispensers. The Firebee was ground-launched, using a hefty rocket-assisted take-off (RATO) booster taken from an ASROC antisubmarine rocket, with test flights performed in the White Sands missile range in New Mexico.
The CeeBee experiments didn't go anywhere, because shooting at a specific target is much trickier than flying over an area and taking pictures. It wasn't until 1971, when more sophisticated guided munitions were available, that the Air Force came back to the concept. The objective was to study an attack system to perform the dangerous "suppression of enemy air defenses (SEAD)" mission, or in other words to destroy enemy anti-aircraft gun and SAM sites. The project was known as HAVE LEMON -- an odd choice of name, since in US slang a "lemon" is a troublesome and worthless automobile or similarly dysfunctional machine.
HAVE LEMON involved a number of Ryan Firebees equipped with a weapons pylon under each wing, a forward-looking TV camera, and a datalink mounted in a pod on top of the vertical tailplane. These drones were given the designation "BGM-34A", and used from late 1971 to perform remote-control strikes on simulated air-defense sites, hitting them with Maverick missiles and HOBOS TV-guided glide bombs. Both the weapons had imaging seekers, allowing a remote control "pilot" to target the weapons. The very first launch of a missile, a Maverick, from a drone was on 14 December 1971. Experiments were also performed with Firebees carrying Shrike antiradar missiles.
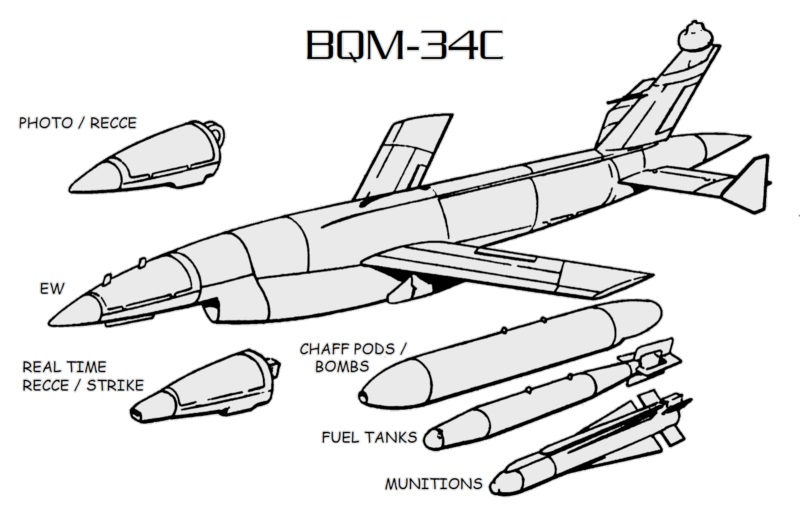
The results were interesting enough to encourage follow-on development, resulting in the "BGM-34B", which featured an extended nose to accommodate an infrared imaging system (some sources say low-light-level TV -- maybe it could fit either) and laser target designator for targeting and control of laser-guided bombs. Tests performed with in 1973 and 1974 with the BGM-34B were also successful, and led Teledyne-Ryan to develop a "BGM-34C" as a conversion of existing Lightning Bug airframes. The BGM-34C could be used for reconnaissance or strike missions by swapping out nose modules and other elements.
The concept proved to be a little too far ahead of its time. Nobody in the Air Force hierarchy stepped forward to take ownership, and the HAVE LEMON exercise faded away. The test squadron was disbanded in 1979, and its roughly 60 drones were put into storage. However, in the summer of 2003 a drone "airshow" of sorts was conducted, in which a Firebee was displayed carrying two Hellfire anti-armor missiles, as well as a pod for dispensing remote battlefield sensors; apparently Northrop Grumman was running the idea back up the flagpole to see if anyone would salute. It seems nobody did.
* Drone advocates claim the Air Force abandoned drones for strike missions because of the inclination of "hotshot flyboys" to keep the mission for themselves, but in fact combat drones long suffered from "command and control" problems, such as the vulnerability of communications links to jamming and spoofing, along with the need to hit specific targets and not accidentally attack civilians or friendly forces. The fact that the Firebees had to be air-launched by a DC-130 Hercules and then recovered by a helicopter made them much more expensive to operate than they would seem on the face of it, and also resulted in a long sortie turnaround time -- at least 24 hours, compared to three hours for an A-10 tank buster aircraft. If a target was too well defended to be attacked by piloted aircraft, it made more sense to use an expendable missile instead of a drone.
The US military had got off to a false start with the Lightning Bugs; drones proved useful in Vietnam, but only for a very specific mission, and they were not as cheap as they seemed at first. US work on drones faded in the 1980s -- but then revived, due to a string of technological improvements, including better communications links, GPS navigation, automated take-off and landings, autonomous flight control. The military started to become more comfortable with the idea of robot aircraft.
Although military drones were originally designed as surveillance platforms, they were increasingly used to carry munitions, their role becoming one of "armed surveillance". In the late 1990s, the idea of using drones more along the lines of piloted jet combat aircraft was revived in the form of machines generally designated as "uninhabited combat air vehicles (UCAV)".
One of the initial concepts was to develop a combat drone on a fast track for "air occupation". The idea was to use unpiloted aircraft to fly continuous patrols over hostile territory, some of the aircraft being fitted with sophisticated sensors to identify enemy activities and target them, and other aircraft following up with attacks. The idea was obviously inspired by USAF air patrols over Iraq and the Balkans. Lockheed Martin suggested rebuilding old F-16A fighters as drones, for air occupation -- fitting them with a wide wing to store additional fuel, and also permit carriage of six or more air-to-surface weapons. The modified F-16As would have had an endurance of 8 hours over a target area, and three sets of them could maintain 24-hour coverage.
The US Navy also conducted studies for combat drones at about the same time. The Navy saw that attack drones had a number of potential benefits. They promised to be cheaper than manned aircraft, with a lower purchase cost and much lower operating costs, since operators could be given much of their training through simulations. Attack drones would also be smaller and so stealthier than manned aircraft, and could perform high-gee maneuvers impossible with piloted aircraft, allowing them to dodge missiles and enemy fighters.
Indeed, since the Navy found themselves increasingly committed to the use of expensive cruise missiles to perform punitive strikes and other "limited" military operations, combat drones offered a potentially cheaper alternative, a "reusable cruise missile". One drone could carry a number of smart GPS-guided munitions and hit multiple targets on a single sortie, and then return home to be used again. Even with a high operational attrition rate, the cost would be less than that of a barrage of cruise missiles.
Lockheed Martin performed studies that envisioned a number of different naval combat drone configurations, including "short take-off and landing (STOVL)" aircraft that could be operated off of aircraft carriers, or "vertical attitude take-off and landing (VATOL)" or "pogo" aircraft that could be operated off destroyers and other surface combat ships, or even submarines. Piloted pogo aircraft were flight-tested in the 1950s and proved a technological dead end at the time, since they couldn't carry a useful payload, and were extremely difficult to land even under benign conditions. With modern technology, the payload limitations could be addressed with lighter materials and RATO-boosted take-off, and modern digital flight control systems could ensure safe landings. The Navy envisioned using pogo drones to arm a guided-missile destroyer "unmanned air wing" with 20 pogo drones for strike, and five pogo drones for reconnaissance. The submarine launch concept was even more speculative, since recovery was a problem.
The Lockheed Martin attack drone concepts were in the 4.5-tonne (10,000-pound) weight class and carried a warload of 450 kilograms (1,000 pounds). Weapons were carried internally to improve stealth, and consisted of 45-kilogram (100-pound) and 115-kilogram (250-pound) small smart bombs. Range would be about 1,100 kilometers (680 miles), with capability for probe-and-drogue aerial refueling. Top speed would be in the high subsonic range, and ceiling would be about 12.2 kilometers (40,000 feet). The drones would be equipped with fairly simple radar or electro-optical sensors to give the operators imagery of the target. Long-range sensing would be provided by other platforms in air or space.

One concept, named the "VTOL Advanced Reconnaissance Insertion Organic Unmanned System (VARIOUS)", had stealthy contours, an engine intake in the back, a vee tail, and exhaust-driven ducted fans in the wings -- presumably with a network of ducts using engine exhaust to maintain control and trim in vertical flight. The machine could be under the direction of a controller on the launch vessel, or in a ground station; it would be able to generally fly itself, and continue with its assigned mission if communications were cut.
BACK_TO_TOP* Attack drone speculations were impressive for their imaginativeness, but had a taste of science fiction. Efforts quickly moved on to real-world machines. In March 1999, DARPA awarded a contract to Boeing for two "X-45A" technology demonstrators. Northrop Grumman and Raytheon also submitted designs, but lost the bid. Boeing rolled out the first prototype for public presentation at Saint Louis, Missouri, in September 2000. First flight was on 22 May 2002, from Edwards Air Force Base in California, and was followed a few months later by the second prototype.
Boeing's X-45A was a stealthy tailless aircraft, with composite outer structures and an aluminum internal structure. It had a midbody-mounted wing with a straight leading edge and a sawtooth trailing edge, all with 45-degree sweep angles.
___________________________________________________________________
BOEING X-45A DEMONSTRATOR:
___________________________________________________________________
wingspan:
10.3 meters (33 feet 10 inches)
length:
8.08 meters (26 feet 6 inches)
height:
2.94 meters (6 feet 8 inches)
empty weight:
3,630 kilograms (8,000 pounds)
gross weight:
5,528 kilograms (12,190 pounds)
maximum speed:
subsonic
range:
600 kilometers (375 MI / 326 NMI)
___________________________________________________________________
The X-45A was powered by an Allied-Signal F124 turbofan with a rectangular thrust-vectoring exhaust that swiveled in the horizontal plane, helping to compensate for the aircraft's lack of a tail assembly. The engine was mounted in the center of the fuselage.
The X-45A had two weapons bays. One of the bays was used to store a pallet of flight test systems, while the other bay was used to carry test stores, such as a single 450-kilogram (1,000-pound) Joint Direct Attack Munition (JDAM) GPS-guided bomb, or a "multipurpose bomb rack" to allow it to carry a wide range of smaller munitions, such as six 110-kilogram (250-pound) bombs. The rack allowed reloading the X-45A with a new set of munitions in about a half hour.

The first demonstrator was built to a "Block 1" standard, with a UHF control link and an L-band telemetry link. The second demonstrator was built to "Block 2" standard, with an added UHF satellite communications link and a "Link 16" high-speed data link, and the first machine was updated to that standard. The two demonstrators were then flown on cooperative test missions. The tests investigated operation of multiple attack drones in military operations; integration of attack drones with other military operations; and the feasibility of using reservists to fly the robot aircraft. The test program was completed in August 2005, with one prototype handed on to the USAF Museum in Dayton, Ohio, and the other handed on to the Smithsonian National Air & Space Museum (NASM) in Washington DC, both now on display.
BACK_TO_TOP* The US Navy did not commit to practical attack drone efforts until the summer of 2000, when the service awarded contracts of $2 million USD each to Boeing and Northrop Grumman for a 15-month concept-exploration program.
Design considerations for a naval attack drone included dealing with the corrosive salt-water environment, deck handling for launch and recovery, integration with command and control systems, and operation in a carrier's high electromagnetic interference environment. The Navy was also interested in using their attack drones for reconnaissance missions, penetrating protected airspace to identify targets for attack waves.
The Navy went on to hand Northrop Grumman a contract for a naval attack drone demonstrator with the designation of "X-47A Pegasus", in early 2001. The Pegasus demonstrator looked like a simple arrowhead, with no tailfin. It had a leading edge sweep of 55 degrees and a trailing edge sweep of 35 degrees. The demonstrator featured retractable tricycle landing gear, with a one-wheel nose gear and dual-wheel main gear, and had six control surfaces, including two elevons and four "inlaids". The inlaids were small flap structures mounted on the top and bottom of the wing forward of the wingtips.

Pegasus was powered by a single Pratt & Whitney Canada JT15D-5C small high-bypass turbofan engine with 14.2 kN (1,450 kgp / 3,190 lbf) thrust. The engine was mounted on the demonstrator's back, with the inlet on top behind the nose. The inlet duct had a serpentine diffuser to prevent radar reflections from the engine fan. However, to keep costs low, the engine exhaust was a simple cylindrical tailpipe, with no provisions for reducing radar or infrared signature.
___________________________________________________________________
NORTHROP GRUMMAN PEGASUS DEMONSTRATOR:
___________________________________________________________________
wingspan:
8.48 meters (27 feet 10 inches)
length:
8.51 meters (27 feet 11 inches)
height:
1.74 meters (5 feet 8 inches)
empty weight:
1,740 kilograms (3,835 pounds)
gross weight:
2,495 kilograms (5,500 pounds)
maximum speed:
subsonic
endurance:
> 1 hour
___________________________________________________________________
The drone's airframe was built of composite materials, construction subcontracted out to Burt Rutan's Scaled Composites company, which had the expertise and tooling to do the job cheaply. The airframe basically consisted of four main assemblies, split down the middle with two assemblies on top and two on bottom.
The Pegasus was rolled out on 30 July 2001, and performed its first flight on 23 February 2003 at the US Naval Air Warfare Center at China Lake, California. The flight test program did not involve weapons delivery. The Pegasus was used to evaluate technologies for carrier deck landings, though the demonstrator did not have an arresting hook. Other issues related to carrier operations involve adding deck tie-downs without compromising stealth characteristics, and designing access panels so that they wouldn't be blown around or damaged by strong winds blowing across the carrier deck. However, the Navy quickly shelved the Pegasus to work on more advanced concepts.
BACK_TO_TOP* While the US Air Force and US Navy had been proceeding with their attack drone demonstrator programs, the enthusiasm of the two services for the concept had grown dramatically. Drones were star performers in the US intervention in Afghanistan in 2001:2002, with the Hellfire-armed General Atomics Predator having a particularly high profile, and drones also proved their value during the US invasion of Iraq in the spring of 2003.
Both the Air Force and the Navy had been developing plans for operational follow-ons to their respective demonstrator programs, but pressures rose for the two services to merge their efforts, resulting in the formation of the "Joint Unmanned Combat Air System (J-UCAS)" program in October 2003 under DARPA direction.
DARPA and Boeing had been working on the "X-45B", a scaled-up X-45A that was seen as the prototype for an operational machine that would reach service in 2008, and would carry a 1,590-kilogram (3,500-pound) warload to a combat radius of 1,665 kilometers (900 nautical miles). Two were to be built, but before any metal could be bent for the two X-45B prototypes planned, the Air Force redirected the effort to an even more capable machine, the "X-45C".
Partly because of the pressure from Boeing, in the summer of 2003 Northrop Grumman formed an alliance with Lockheed Martin to help develop the "X-47B", a follow-on to the X-47 that would compete against Boeing efforts. The alliance was focused on building a modular stealthy attack drone that could be adapted to a wide range of missions.
A Navy attack drone would have a stronger airframe and landing gear for carrier take-offs and landings; an arresting hook; and avionics for automated carrier approach and landing, along with a "relative navigation system" that would tell the attack drone where it is relative to the carrier.
* However, as it turned out, the joint program was doomed. In an abrupt turnaround, in late 2004 the J-UCAS program was reassigned to the Air Force, removing DARPA from the driver's seat. Then, in early 2006, the USAF decided that requirements had changed and dropped out of the program, canceling the X-45C prototypes. That killed the J-UCAS program. J-UCAS had begun with considerable enthusiasm, but the program had been marked by shifts in definition and requirements from the early days, and so the abrupt collapse of the J-UCAS program didn't come as any big surprise.
The Navy attempted to get back on track. In early 2007, the Navy began a competition for a "UCAS Demonstrator (UCAS-D)" program, with Boeing and Northrop Grumman jumping in. The Northrop Grumman X-47B won the competition in August 2007. The first of two X-47Bs was rolled out in early 2009, and performed its initial flight in early 2011; the second followed late in the year. The X-47B was very stealthy, with a low radar cross-section over a wide range of radar bands.

Unlike the X-47A, the X-47B actually had distinct wings, extended from a diamond-shaped fuselage like that of the X-47A. The wings improved handling and range. The body's leading-edge sweep was 55 degrees, with the wing sweep reduced to 35 degrees. The wings folded up 135 degrees for carrier hangar storage; preventing the wing fold from compromising stealth was a tricky design challenge, with the fold hidden under a strip. Flight control surfaces included elevons, ailerons, and a spoiler on top of each wing. It was powered by a Pratt & Whitney F100-PW-220U bypass turbojet, a marinized and non-afterburning version of the same engine used on F-15 and F-16 fighters, providing up to 76.6 kN (7,805 kgp / 16,000 lbf) thrust. The X-47B had tricycle landing gear, the nose gear with twin wheels, the main gear with single wheels, all assemblies retracting forward.
___________________________________________________________________
NORTHROP GRUMMAN X-47B:
___________________________________________________________________
wingspan:
18.9 meters (62 feet 1 inch)
wingspan (folded):
9.42 meters (30 feet 11 inches)
wing area:
91.7 sq_meters (935 sq_feet)
length:
11.6 meters (38 feet)
empty weight:
12,975 kilograms (28,610 pounds)
gross weight:
20,080 kilograms (44,275 pounds)
maximum speed:
high subsonic
ceiling:
> 12,200 meters (> 40,000 feet)
range:
> 3,885 km (> 2,415 mi / 2100 NMI)
___________________________________________________________________
The X-47B could operate from a carrier in weather too foul for piloted flight, had an endurance with inflight refueling of up to a hundred hours, and could carry a total of 12 110-kilogram (250-pound) Small Diameter Bombs (SDB) in two weapons bays. Work was also done on plugging fuel tanks into the two weapons bays to permit the drone to be used as an inflight refueling tanker -- a scheme which has been greeted with enthusiasm by Navy F/A-18 Super Hornet pilots, who had been tasked with the tanker mission.
A number of piloted surrogates -- an F/A-18D, a Beech King Air, and a Learjet -- were used in the development program, mostly for software evaluation. Carrier trials were performed in 2013, with the first carrier landing on 10 July 2013. The program ended in 2015, with the two X-47Bs used in trials on occasion since that time.

Boeing did not get out of the attack drone business after the cancellation of J-UCAS, with work continuing with company funds for a demonstrator named the "Phantom Ray" derived from the X-45C work. The machine was rolled out in 2010 and performed its initial flight in April 2011. It was a delta flying wing, and owed a great deal to the X-45C. A series of test flights followed, but little has been said of the Phantom Ray program for years. It appears to be flown on occasion for trials. It will likely be passed on to an air museum in time.
BACK_TO_TOP* The UCAS-D program was to lead to an operational system under the "Unmanned Carrier-LAunched Surveillance & Strike (UCLASS)", which was kicked off in 2013. However, the attack role was quickly de-emphasized, with UCLASS refocused on the "intelligence, surveillance and reconnaissance (ISR)" mission, there being doubts that autonomous drones were a good fit for direct combat. In 2016, the effort was redefined again, to be focused on the carrier-based tanker role, with ISR and communications relay as possible secondary missions, and strike being put off as a future.
UCLASS then became the Navy's "Carrier-Based Aerial Refueling System (CBARS)" effort. Four companies entered proposals, the competitors including General Atomics, Lockheed Martin, Northrop Grumman, and Boeing. Northrop Grumman dropped out early, company officials saying they didn't believe they had a good fit to requirements. Boeing won the contest in 2018 with the "MQ-25 Stingray", with the Navy ordering an initial batch of four machines for test and evaluation, with up to 69 more planned to be acquired.

Some observers were baffled by the CBARS program: the Navy had started out wanting a drone strike aircraft, with ISR capabilities, and ended up with a tanker drone instead. On reflection, it did make sense: the Navy had a requirement for more tanker capability, and buying relatively cheap drones promised to be much more cost-effective for the job than buying expensive Super Hornets -- allowing the Super Hornets to give up the tanker role and focus on combat instead. In addition, there was no saying the MQ-25 couldn't be used for other missions. The Navy could quickly acquire MQ-25s, and then bring them up for other missions over time.
Anyway, although the Boeing MQ-25 benefited from the company's "Phantom Ray" drone demonstrator the Stingray, as introduced, it was clearly a different design. While the Phantom Ray was a flying wing, the MQ-25 had a pumpkin-seed shaped fuselage with an engine intake on the back, slightly-swept wings set well back, and a shallow vee tail, the tailfins being all-moving. There was a stores pylon under each wing, the prime function being to carry a fuel tank or tanker pod -- though artwork also showed them carrying two stand-off munitions, and reconnaissance / communications relay pods are obvious options as well.
The Stingray had tricycle landing gear, all gear retracting backward. The main gear had single wheels, while the nose gear had twin wheels and a catapult attachment; there was an arresting hook under the rear fuselage. The drone had a length of 16 meters (51 feet) and wingspan of 23 meters (31 feet) -- the wings folded for carrier-deck storage, reducing width to 9.5 meters (31 feet). The aircraft was powered by a single Rolls-Royce AE 3007N turbofan engine delivering 44.1 kN (4,500 kgp / 10.000 lbf) thrust. Operational radius was 925 kilometers (575 miles / 500 NMI). There was a stores pylon under each wing.

First flight of the prototype was on 19 September 2019; first developmental machine flew in 2021, with introduction to service no earlier than 2025.
* In the meantime, the US Air Force moved on a new concept, the "Loyal Wingman" -- the idea being to have a semi-autonomous drone that could accompany a piloted fighter, and be assigned supporting tasks by the pilot. Three or four could be controlled by one fighter, the pilot issuing general commands, the drones figuring out the details on their own. It would multiply the fighter's capabilities, but only cost a fraction as much, in part by relying on the fighter's advanced radar and other combat systems.
A full-scale mockup of Boeing's "Airpower Teaming System (ATS)" drone was unveiled at the Australian International Airshow in early 2019. The drone was developed by Boeing Autonomous Systems and Boeing's Phantom Works International unit in Australia, with funding from Boeing and the Canberra government, along with the involvement of local suppliers. A demonstrator machine performed its first flight on 1 March 2021, with the design later given the designation of "MQ-28A Ghost Bat". Two more prototypes followed. Incidentally, the MQ-28A was said to be the first new military aircraft designed in Australia for decades.
The Ghost Bat demonstrator was 11.6 meters (38') long, with a wingspan of 10.9 meters (24'). It featured high-mounted swept wings, a vee tail with all-moving tailplanes, stealthy contours, and retractable tricycle landing gear -- all gear with single wheels and retracting backward, the main gear into the fuselage. The Royal Australian Air Force (RAAF) ordered a batch of 13, with deliveries no earlier than 2024.

The production machine will be powered by a derivative of a commercial business-jet turbofan. It will have an AI-based flight / mission system that will allow it to safely accompany other aircraft; a range of 3,700 kilometers (2,300 miles / 2,000 NMI); and have adequate performance to keep up with RAAF Super Hornet fighters or F-35s. The design will be low-cost, modular, and flexible, able to be quickly reconfigured for different missions using "snap-on, snap-off" payloads. The nose section can be swapped out for different missions. The initial multi-mission variant is intended for intelligence, surveillance, reconnaissance, and electronic warfare. Communications relay and translation is another obvious option; no mention of munitions carriage yet.
The Pentagon is interested in the Ghost Bat, but hasn't decided to obtain any yet. The plan is to sell the drone around the world; development was sited in Australia at least in part because, it seems, that meant fewer export controls.
BACK_TO_TOP* Roughly in parallel, Kratos Systems of the US has been working on a drone broadly similar to the Boeing ATS, under a contract from the under the direction of the US Air Force Research Laboratory (AFRL), with first flight of the "XQ-58A Valkyrie" on 5 March 2019.

It was built in response to the AFRL's "Low-Cost Attritable Aircraft Technology", which is intended to produce relatively cheap combat aircraft. The first flight of the XQ-58A was only 2.5 years after contract award. It was a stealthy design, with swept wings and a butterfly tail, and an engine intake for a small turbofan on the back. The aircraft was launched from a rail using a booster rocket, and recovered by parachute.
___________________________________________________________________
KRATOS XQ-58A VALKYRIE:
___________________________________________________________________
wingspan:
8.25 meters (27 feet)
length:
8.8 meters (28 feet 10 inches)
empty weight:
1,135 kilograms (2,500 pounds)
max gross weight:
2,950 kilograms (6,500 pounds)
maximum speed:
high subsonic
ceiling:
13,720 meters (45,000 feet)
range:
4,830 km (3,000 mi / 2,605 NMI)
___________________________________________________________________
The engine provided 8.9 kN (905 kgp / 2000 lbf) thrust. Speed was high subsonic. Munitions could be carried in twin weapons bays or on underwing pylons, maximum payload being 545 kilograms (1,200 pounds). The XQ-58A was designed to be cheap and "attritable", meaning operationally expendable if need be, with the engine and most other assemblies not built for long life; while the Boeing ATS drone is more comparable to a piloted combat aircraft, and proportionally more expensive.
The USAF obtained at least three prototypes, being used for evaluation, dovetailing into the service's "Collaborative Combat Aircraft (CCA)" program. The US Marines are also interested in the Valkyrie, having obtained two for evaluation, flying them from 2023. The Marines envision them as useful for missions including surveillance / reconnaissance, electronic warfare, and of course as Loyal Wingmen for crewed fighters. Apparently the Marines see them as particularly useful for supporting their F-35B vertical take-off fighters by carrying countermeasures gear. Some Valkyries have been fitted with the F-35's secure Multifunction DAta Link (MADL) to provide a communications connection. The US Navy appears to be interested, but hasn't made a move at last notice.
The initial prototype Valkyries are being followed by "Block 1" machines, to be followed in turn by "Block 2" machines, with more payload and range. Further blocks are expected, with Kratos dropping hints of a set of different configurations.
* The Air Force has also performed experiments with another Kratos drone, the "Unmanned Tactical Aerial Platform (UTAP) 22" AKA "Mako" under the Air Force "Skyborg" program. The UTAP-22, which was introduced in 2015, was derived from Kratos BQM-167 target drone and looks much like it, being a dart with swept wings, swept tail surfaces, and an underslung turbojet engine -- the BQM-167 is powered by a MicroTurbo Tri 60-5+ turbojet, with 4.4 kN (450 kgp / 990 lbf (4.4 kN) thrust, but the UTAP-22 may have a different engine. It is launched by rocket booster, or can be air-launched, and is recovered by parachute.
____________________________________________________________________
KRATOS UTAP-22 MAKO:
___________________________________________________________________
wingspan:
3.2 meters (10 feet 6 inches)
length:
6.1 meters (20 feet 1 inch)
empty weight:
205 kilograms (600 pounds)
max gross weight:
930 kilograms (2,050 pounds)
maximum speed:
high subsonic
ceiling:
15,245 meters (50,000 feet)
range:
1,960 km (1,215 mi / 1400 NMI)
___________________________________________________________________
The Skyborg version of the UTAP-22 has an "Autonomy Core System (ACS)", with AI capability, that allows it to conduct missions on its own. It has an internal payload bay, but can also carry underwing and wingtip stores, maximum total load being 225 kilograms (500 pounds). Initial flight of the Skyborg ACS was in the spring of 2021. Later flights showed the Skyborg UTAP-22 with a serpentine engine inlet, with a sensor -- possibly an infrared search & track (IRST) device -- mounted above the inlet.
The UTAP-22 would seem to have some of the same disadvantages that killed the HAVE LEMON project decades earlier: too much handling for launch and recovery. However, DARPA has been working on a "Gremlins" program, in which drones are launched and recovered from a Lockheed Martin C-130 Hercules cargolifter. The UTAP-22 might well be flown under a similar scheme.
Other companies are working on the Skyborg project, though not much has been said about the others; it appears the Boeing ATS and the XQ-58A will be investigated as parts of the program. Skyborg doesn't appear to be concerned with developing an operational Loyal Wingman system, instead to determine the baseline technology and procedures for a follow-on operational system that will leverage off the Skyborg program.
Kratos has also offered the "Air Wolf", an armed version of their small MQM-178 Firejet target, which is only about 3.3 meters (10'10") long. It is not clear exactly what its intended roles are. Kratos is also working on other drone programs that are being kept secret for the time being.
One interesting possibility is to leverage off the "Fifth Generation Aerial Target (5GAT)", a stealthy target drone developed by Sierra Technical Systems, which was bought up by Kratos. Not much is known about it, other than it's about the size of a lightweight jet fighter, and operates from runways. Kratos has said little about it, other than it presents "interesting possibilities". It could be a candidate for the USAF's CCA effort, which at last notice was still a purely experimental program, with no plans for operational deployment.
BACK_TO_TOP* There's considerable interest in Loyal Wingman drones around the world these days. Development work has been conducted in China, Britain, India, Russia, and South Korea. So far, nothing much has come of it except some flights of demonstrators, along with a long list of unbuilt concepts -- one visible exception is the Turkish Baykar-Bayraktar "Kizilelma (Red Apple)" UCAV.
The Kizilelma started life as the "MIUS" program, a Turkish acronym roughly translating to "UCAV System", with initial flight of the first prototype on 14 December 2022. As it emerged, the Kizilelma had a stealthy airframe, it seems of largely composite construction, and was of canard-delta configuration with twin tailfins. It had tricycle landing gear, all gears with single wheels, and a high-lift control surface arrangement, including all-moving canards and full-span rear flaperons. The control surfaces gave it short take-off & landing characteristics, allowing it to operate off an amphibious assault ship or light aircraft carrier.

The Kizilelma was powered by a Ukrainian Ivchenko-Progress AI-25TLT medium-bypass turbofan, with 16.9 kN (1,720 kgp / 3,790 lbf) thrust. The UCAV had twin internal weapons bays, and six hardpoints for external stores. It featured a highly-autonomous flight control system, plus an AESA radar and other advanced avionics.
____________________________________________________________________
BAYKAR-BAYRAKTER KIZILELMA
___________________________________________________________________
wingspan:
10 meters (32 feet 10 inches)
length:
14.7 meters (48 feet 3 inches)
height:
3.3 meters (10 feet 10 inches)
max take-off weight:
8,500 kilograms (18,740 pounds)
payload weight:
1,500 kilograms (3,305 pounds)
maximum speed:
high subsonic
ceiling:
14,000 meters (45,000 feet)
range (internal fuel only):
930 km (580 mi / 500 NMI)
___________________________________________________________________
Introduction to service will be no earlier than 2024. It is expected that the initial variant, the "Kizilelma-A", will be followed by a supersonic "Kizilelma-B" with the afterburning AI-322F low-bypass turbofan, providing a maximum of 24.5 kN (2,500 kgp / 5,510 lbf) dry thrust and 44 kN (4,490 kgp / 9,900 lbf) afterburning thrust. There's also consideration of a "Kizilelma-C" with twin AI-322F engines.
* This document began life in the form of an extended document on all drones I could find. It became unwieldy and I had to break it up, then covert it into small focused documents. This particular item is on the brief side, but I had enough to make it interesting -- and UCAVs are a growth field, close to the transition from experimentals to operational machines, meaning this document will grow as well. Their relatively low cost and flexible operation suggests that they will prove very important in the combat aircraft fleets of the future. In time, this document will expand.

* This document was mostly a scavenger hunt from online sources. These aircraft are not well documented.
* Illustrations credits:
* Revision history:
v1.0.0 / 01 jul 21 v1.0.1 / 01 jun 23 / Review, update, & polish. v1.1.0 / 01 nov 23 / Review, update, & polish.BACK_TO_TOP

